18 .positivity_constraint(
true)
25 Real
const gamma = 1e-2 / Psi.array().abs().sum();
26 auto const result = l1(gamma, input);
28 if (not result.good)
SOPT_THROW(
"Did not converge");
31 Real constexpr eps = 1e-4;
32 for (
size_t i(0); i < 10; ++i) {
35 Real
const dobj = l1.objective(input, position, gamma);
37 if (dobj < result.objective - 1e-8)
38 SOPT_THROW(
"This is not the minimum we are looking for: ")
39 << dobj <<
" <~ " << result.objective;
Computes inner-most element type.
Real nu() const
Bounds on the squared norm of the operator Ψ
Eigen::CwiseUnaryOp< const details::ProjectPositiveQuadrant< typename T::Scalar >, const T > positive_quadrant(Eigen::DenseBase< T > const &input)
Expression to create projection onto positive quadrant.
Eigen::Matrix< T, Eigen::Dynamic, 1 > Vector
A vector of a given type.
std::complex< t_real > t_complex
Root of the type hierarchy for (real) complex numbers.
Eigen::Matrix< T, Eigen::Dynamic, Eigen::Dynamic > Matrix
A matrix of a given type.
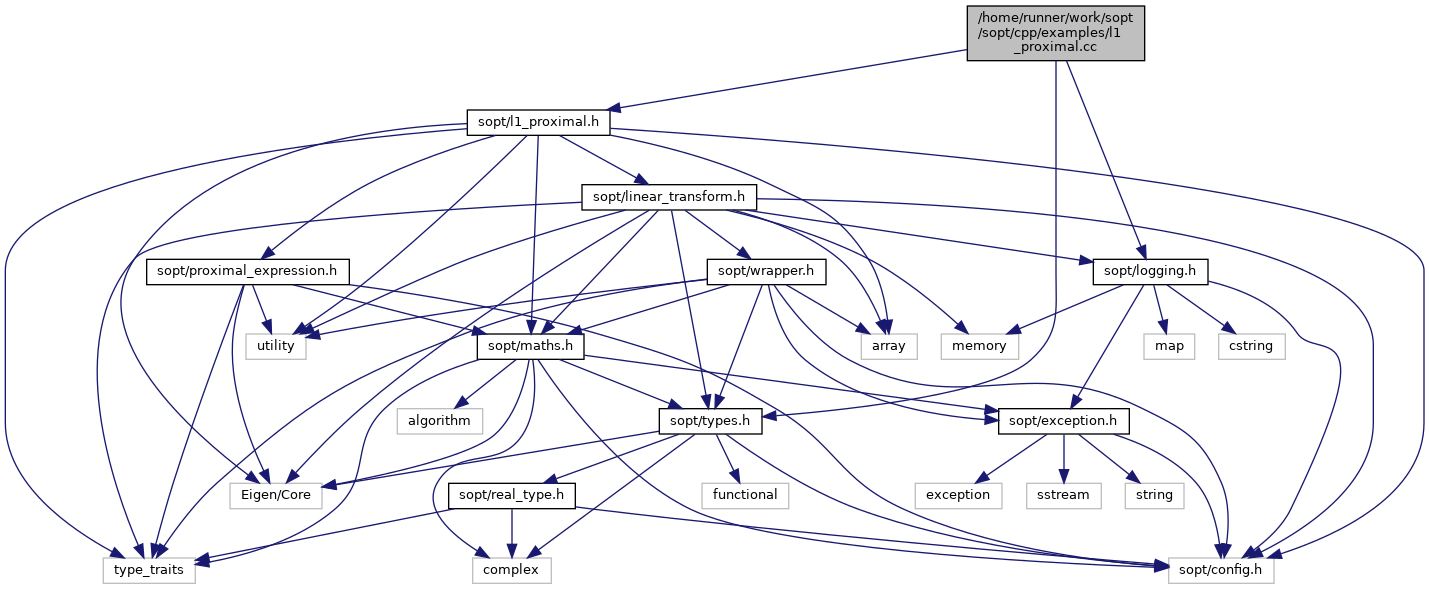
 Include dependency graph for l1_proximal.cc:
Include dependency graph for l1_proximal.cc: