27 auto const psi = sopt::gradient_operator::gradient_operator<Scalar>(image.rows(), image.cols());
28 Matrix input = Matrix::Ones(image.rows(), image.cols());
29 for (Eigen::Index i(0); i < image.rows(); i++) input.row(i) *=
static_cast<Scalar>(i);
30 Vector output = psi.adjoint() * Vector::Map(input.data(), input.size());
31 CAPTURE(output.segment(0, 5));
32 CAPTURE(output.segment(image.size(), 5));
33 CHECK(output.size() == 2 * input.size());
34 CHECK(output.segment(0, input.size()).isApprox(Vector::Zero(input.size())));
35 CHECK(output.segment(input.size(), input.size() - 1)
36 .isApprox(Vector::Constant((Eigen::Index)0.5, input.size() - 1)));
37 input = Matrix::Ones(image.rows(), image.cols());
38 for (Eigen::Index i(0); i < image.cols(); i++) input.col(i) *=
static_cast<Scalar>(i);
39 output = psi.adjoint() * Vector::Map(input.data(), input.size());
40 CAPTURE(output.segment(0, 5));
41 CAPTURE(output.segment(image.size(), 5));
42 CHECK(output.size() == 2 * input.size());
43 CHECK(output.segment(0, input.size() - 1).isApprox(Vector::Constant((Eigen::Index)0.5, input.size() - 1)));
44 CHECK(output.segment(input.size(), input.size()).isApprox(Vector::Zero(input.size())));
Eigen::Array< T, Eigen::Dynamic, Eigen::Dynamic > Image
A 2-dimensional list of elements of given type.
Eigen::Matrix< T, Eigen::Dynamic, 1 > Vector
A vector of a given type.
Eigen::Matrix< T, Eigen::Dynamic, Eigen::Dynamic > Matrix
A matrix of a given type.
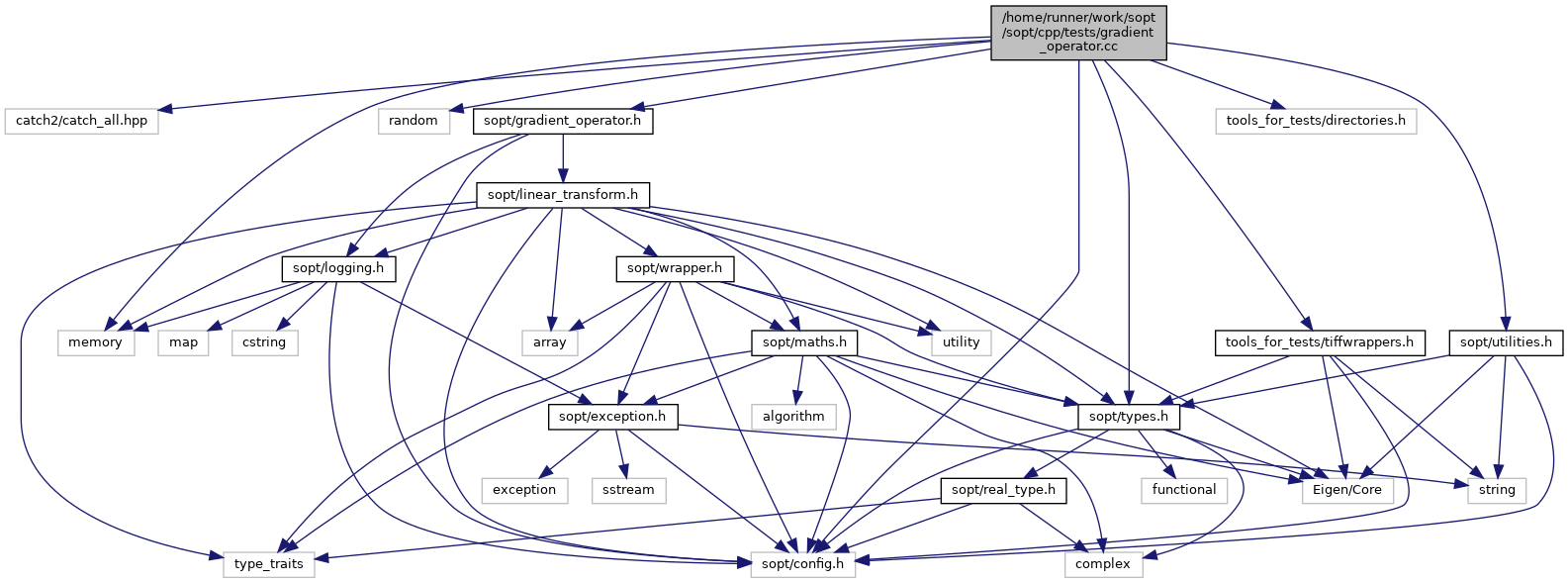
 Include dependency graph for gradient_operator.cc:
Include dependency graph for gradient_operator.cc: