|
SOPT
Sparse OPTimisation
|
|
SOPT
Sparse OPTimisation
|
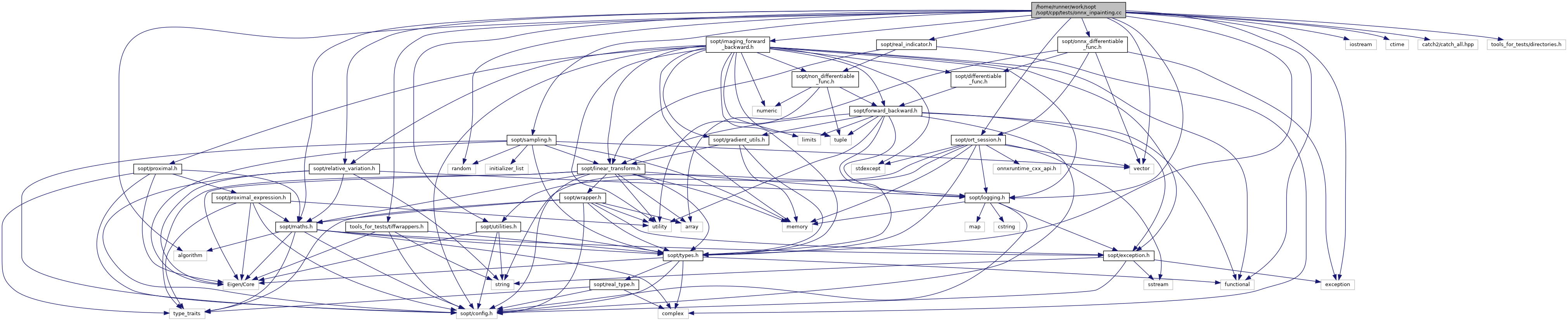
#include <algorithm>#include <exception>#include <functional>#include <iostream>#include <random>#include <vector>#include <ctime>#include <catch2/catch_all.hpp>#include "sopt/imaging_forward_backward.h"#include "sopt/real_indicator.h"#include "sopt/logging.h"#include "sopt/maths.h"#include "sopt/relative_variation.h"#include "sopt/sampling.h"#include "sopt/types.h"#include "sopt/utilities.h"#include "sopt/ort_session.h"#include "sopt/onnx_differentiable_func.h"#include "tools_for_tests/directories.h"#include "tools_for_tests/tiffwrappers.h" Include dependency graph for onnx_inpainting.cc:
Include dependency graph for onnx_inpainting.cc:Go to the source code of this file.
Typedefs | |
| using | Scalar = double |
| using | Vector = sopt::Vector< Scalar > |
| using | Matrix = sopt::Matrix< Scalar > |
| using | Image = sopt::Image< Scalar > |
| using | LinearTransform = sopt::LinearTransform< Vector > |
Functions | |
| TEST_CASE ("Inpainting") | |
| using Image = sopt::Image<Scalar> |
Definition at line 32 of file onnx_inpainting.cc.
| using LinearTransform = sopt::LinearTransform<Vector> |
Definition at line 33 of file onnx_inpainting.cc.
| using Matrix = sopt::Matrix<Scalar> |
Definition at line 31 of file onnx_inpainting.cc.
| using Scalar = double |
Definition at line 29 of file onnx_inpainting.cc.
| using Vector = sopt::Vector<Scalar> |
Definition at line 30 of file onnx_inpainting.cc.
| TEST_CASE | ( | "Inpainting" | ) |
Definition at line 35 of file onnx_inpainting.cc.
References sopt::LinearTransform< VECTOR >::adjoint(), sopt::epsilon(), mersenne(), sopt::tools::models_directory(), sopt::tools::read_standard_tiff(), sopt::sigma(), and SOPT_HIGH_LOG.