|
SOPT
Sparse OPTimisation
|
|
SOPT
Sparse OPTimisation
|
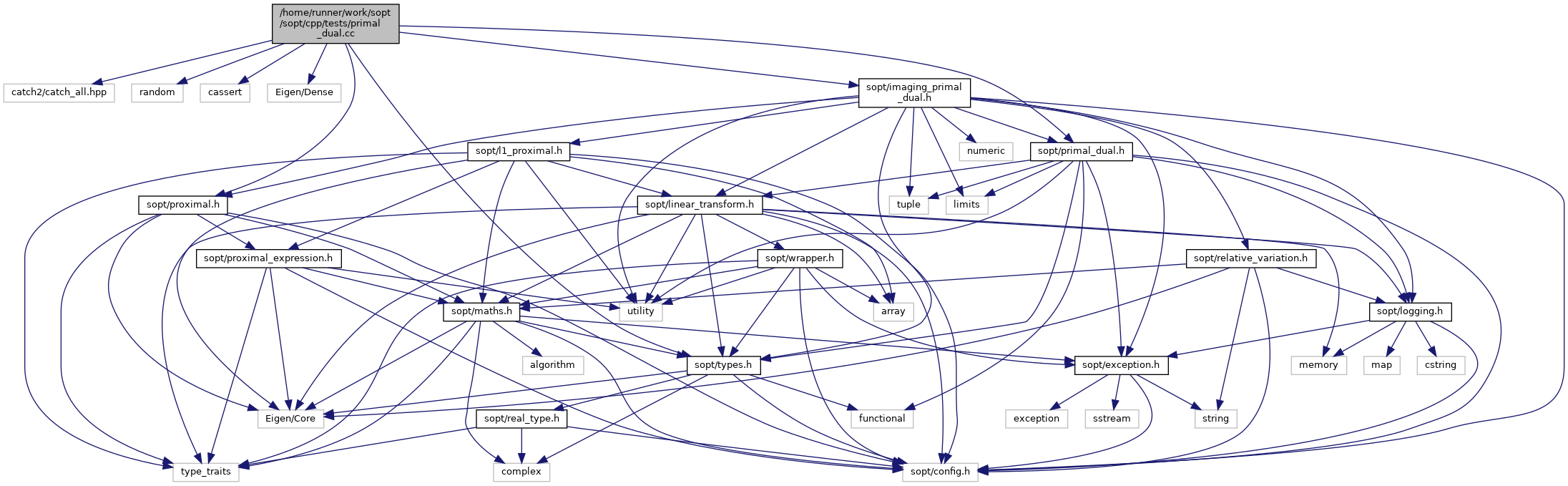
#include <catch2/catch_all.hpp>#include <random>#include <cassert>#include <Eigen/Dense>#include "sopt/imaging_primal_dual.h"#include "sopt/primal_dual.h"#include "sopt/proximal.h"#include "sopt/types.h" Include dependency graph for primal_dual.cc:
Include dependency graph for primal_dual.cc:Go to the source code of this file.
Classes | |
| struct | is_primal_dual_ref< T > |
Typedefs | |
| using | Scalar = sopt::t_real |
| using | t_Vector = sopt::Vector< Scalar > |
| using | t_Matrix = sopt::Matrix< Scalar > |
Functions | |
| TEST_CASE ("Primal Dual Imaging", "[primaldual]") | |
| TEST_CASE ("Primal Dual with 0.5 * ||x - x0||_2^2 function", "[primaldual]") | |
| TEST_CASE ("Check type returned on setting variables") | |
Variables | |
| constexpr auto | N = 5 |
| using Scalar = sopt::t_real |
Definition at line 13 of file primal_dual.cc.
| using t_Matrix = sopt::Matrix<Scalar> |
Definition at line 15 of file primal_dual.cc.
| using t_Vector = sopt::Vector<Scalar> |
Definition at line 14 of file primal_dual.cc.
| TEST_CASE | ( | "Check type returned on setting variables" | ) |
Definition at line 87 of file primal_dual.cc.
| TEST_CASE | ( | "Primal Dual Imaging" | , |
| "" | [primaldual] | ||
| ) |
Definition at line 20 of file primal_dual.cc.
References sopt::epsilon(), N, sopt::algorithm::ImagingPrimalDual< SCALAR >::Phi(), sopt::positive_quadrant(), sopt::algorithm::ImagingPrimalDual< SCALAR >::Psi(), sopt::algorithm::ImagingPrimalDual< SCALAR >::residual_convergence(), and sopt::target().
| TEST_CASE | ( | "Primal Dual with 0.5 * ||x - x0||_2^2 function" | , |
| "" | [primaldual] | ||
| ) |
Definition at line 55 of file primal_dual.cc.
References sopt::proximal::id(), sopt::algorithm::PrimalDual< SCALAR >::is_converged(), and N.
|
constexpr |
Definition at line 18 of file primal_dual.cc.
Referenced by TEST_CASE().